

電動汽車電機控制單元是控制電動汽車驅動電機運作的核心部件,它將電池的直流電能轉換成驅動電機所需的交流電能,並通過精確控制調節車輛的行駛狀態。
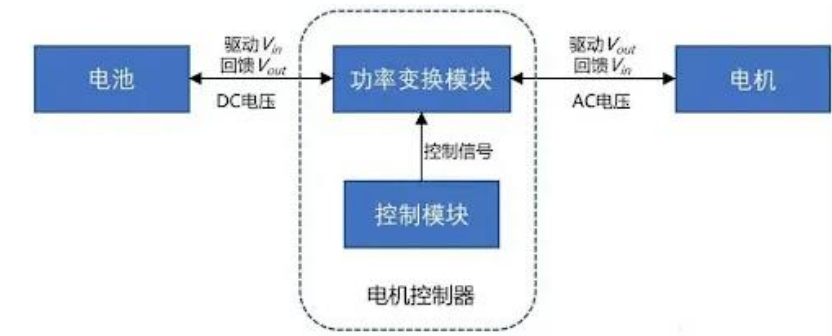
電動汽車電機控制單元(MCU)直接關聯到電機的運行效果和能效管理。從基本的工作原理來看,MCU通過電壓源逆變器(VSI)和脈寬調製(PWM)技術,將直流電轉換為可調頻率的交流電,從而控制電機的轉速和扭矩。這一過程需要MCU根據駕駛條件調整電機轉速和轉矩,以適應不同的駕駛需求。
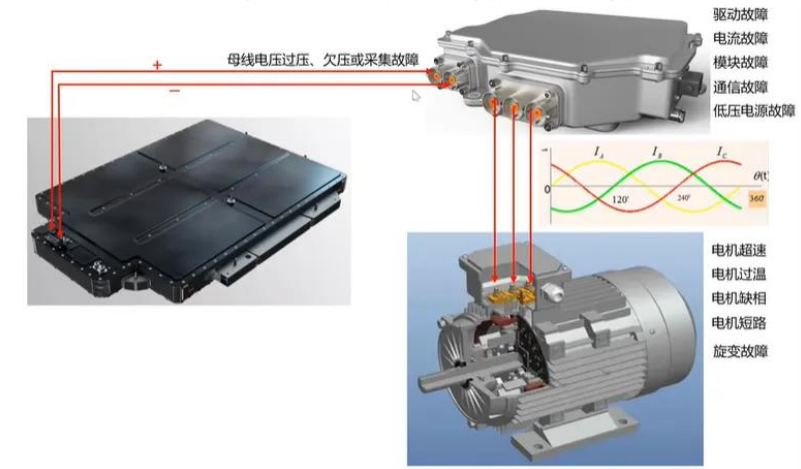
MCU的設計還包含了多種保護機制,以確保系統的安全穩定運行。這些保護功能包括電池輸入端保護、故障檢測、電機控制器本體故障保護以及過載保護。此外,MCU還具備系統診斷與反饋能力,能夠實時監測並反饋電池狀態、電機溫度、控制器溫度等關鍵信息。
電機控制器(MCU)的設計原理如圖所示: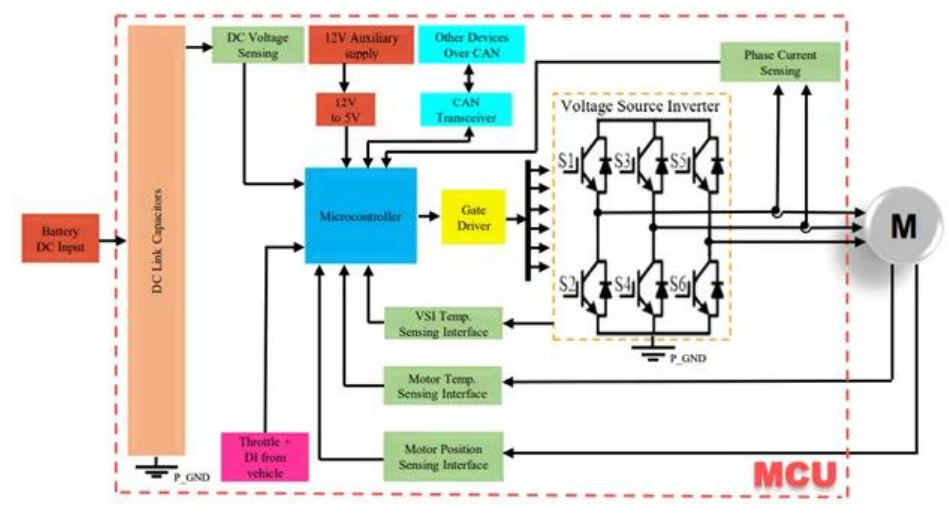
- 微控制器(Microcontroller):微控制器的核心功能是控制電壓源逆變器(VSI),將電池接收的電能轉換為所需的電能形式。它接收駕駛員的油門信號作為主要控制輸入,通過調整脈寬調製(PWM)脈衝的占空比來控制速度和扭矩。微控制器中實施的場向量控制(FOC)確保了電機控制的高效性和快速性。
- 電壓源逆變器(VSI):VSI負責將直流電轉換為交流電,以驅動電機。通常使用六個MOSFET實現VSI,有時為了增加電流容量,也會使用MOSFET的並聯組合。
- 相電流感應(Phase Current Sensing):使用基於霍爾效應的電流傳感器來感應電機的相電流,確保精確控制。通常使用兩個電流傳感器感應兩個相電流,第三個相電流則由這兩個派生得出。
- 電源供應(Power Supply):MCU內置傳感器需要適當的電源供應。此外,微控制器、電機溫度傳感器和位置反饋傳感器也需要不同級別的電源供應。電源供應部分將固定直流電壓轉換為所需的不同級別電壓。
- 柵極驅動器(Gate Driver):柵極驅動器電路用於放大微控制器產生的PWM脈衝的電壓水平,確保信號的有效傳遞。
- CAN收發器(CAN Transceiver):CAN收發器用於驅動和檢測通過CAN總線傳輸的數據。它將控制器使用的單端邏輯轉換為在CAN總線上傳輸的差分信號。
- 位置反饋傳感器:這些傳感器提供電機轉子的位置信息,對於實現精確的矢量控制至關重要。通常使用編碼器或旋變傳感器來提供這些反饋信號。
- 溫度傳感器:溫度傳感器用於監測電機和控制器的溫度,以確保系統的安全運行,防止過熱。
這些模塊的協同工作確保了電機控制器能夠高效、精確地控制電機,同時確保系統的穩定性和安全性。
綜上所述,電動汽車電機控制單元作為電動汽車動力系統的核心組件,其設計和技術實現對整車性能有著直接影響。通過不斷的技術創新和優化,未來的MCU有望進一步提升電動汽車的性能和駕駛體驗,推動整個行業的持續發展。
評論