

在介紹RTK之前,需要先介紹什麼是GNSS。
1、GNSS的設計思想是將空間的人造衛星作為參照點,確定一個物體的空間位置。 根據幾何學理論可以證明,通過精確測量地球上某個點到三顆人造衛星之間的距離(衛星是通過測距碼與載波來確定衛星與接收機的距離,衛星星曆能夠確定衛星的位置。 ),能對此點的位置進行三角形的測定,這就是 GNSS最基本的設計思路及定位功能。 理論上三顆衛星能夠確定接收機的平面坐標,四顆衛星能夠確定接收機的高程,但是在實際應用中,不會只用到四顆衛星,為了提高精度和穩定性,很多接收機廠家的產品會用十顆以上、甚至幾十顆上百顆的衛星去做定位解算。
2、GNSS數據誤差,衛星導航系統的誤差從來源上可以分為4類:與信號傳播有關的誤差、與衛星有關的 誤差、與接收機有關的誤差以及與地球轉動有關的誤差。
3、減少甚至消除2中提到的誤差是提高定位精度的措施之一,而差分GNSS可有效利用已知位置的基準站將公共誤差估算出來,通過相關的補償算法削弱或消除部分誤差, 從而提高定位精度。
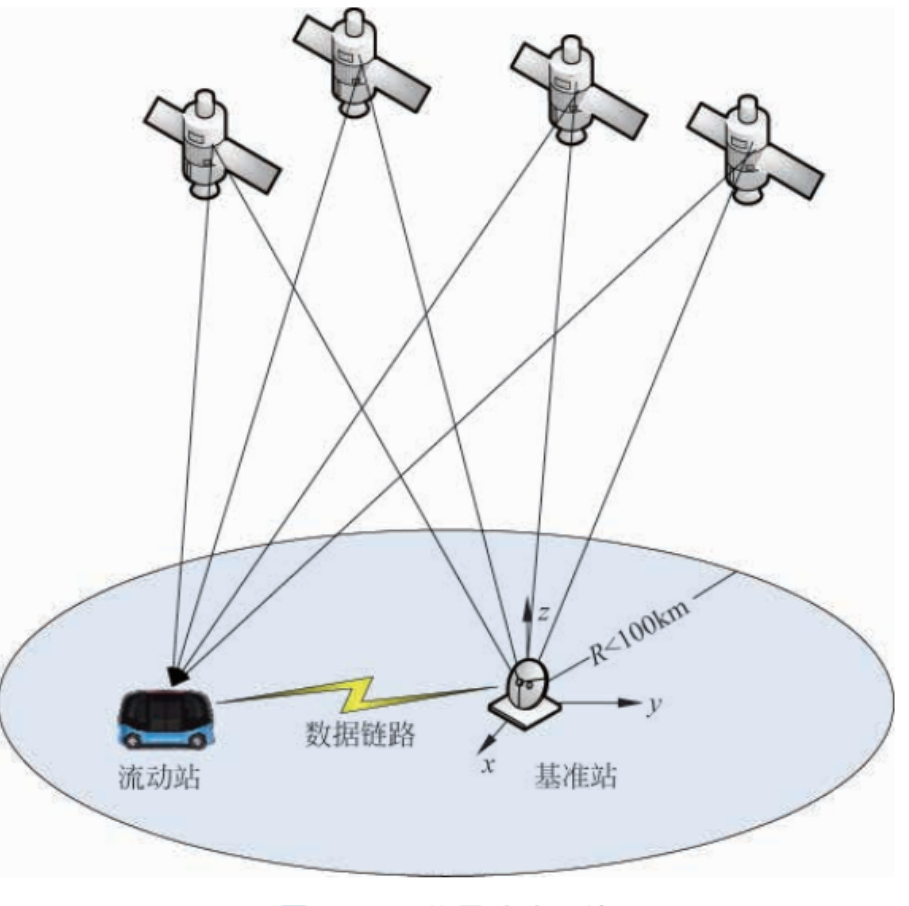
差分 GNSS的基本原理主要是在一定地域範圍內設置一台或多台接收機,將一台已知精密坐標的接收機作為差分基準站,基準站連續接收 GNSS信號,與基準站已知的位置和距離數據進行比較,從而計算出差分校正量。 然後,基準站就會將此差分校正量發送到其範圍內的流動站進行數據修正,從而減少甚至消除衛星時鐘、衛星星曆、電離層延遲與對流層 延遲所引起的誤差,提高定位精度。
流動站與差分基準站的距離直接影響差分 GNSS的效果,流動站與差分基準站的距離越近,兩站點之間測量誤差的相關性就越強,差分 GNSS系統性能就越好。
RTK(Real Time Kinematic)技術——RTK 是一種利用 GNSS載波相位觀測進行實時動態相對定位的技術。 通過RTK技術,也就是說流動站通過基站的觀測值數據進行差分改正來實現的動態的厘米級定位。 RTK技術在多個領域起著十分關鍵的作用,如高精度測量測繪、無人機、智能駕駛、精準農業、智能割草機等。
對於沒有基站提供觀測值進行差分解算的定位技術我們又稱之為單點定位,定位精度在米級,在定位精度要求不高的領域有比較廣泛的應用,如消費類無人機、Tracker、車載應用、人員定位等,單點定位產品也叫標準精度產品or導航線產品。 支持差分定位以及RTK技術的也叫高精度產品,在定位要求較高的行業有廣泛的應用。
4、RTK技術在智能割草機上的應用:
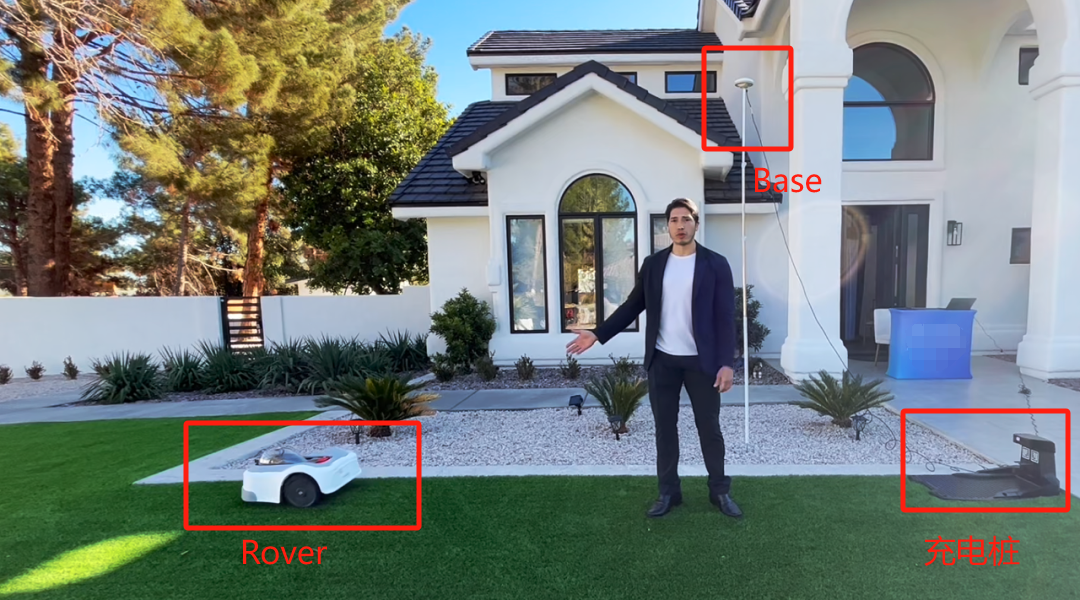
由於政策的原因,以及海外的巨大需求,促進的國內智能割草機的發展。 目前“1+1”方案是智能割草機正在應用的主流RTK方案。 “1+1”是指1 base + 1 rover的方案,智能割草機是rover,base為基站,割草機與基站上都需要一個GNSS模組or晶片,割草機與基站之間通過電台進行數據傳輸。 需要割草機端支持RTK算法,基站時刻都在通過電台向外播放觀測數據,割草機端接收到基站的觀察數據,內部的RTK算法進行RTK解算,輸出厘米級的定位給割草機做路徑規劃和運動控制,因此割草機能夠精確在一片區域內進行行駛,搭配割草機底盤的刀片,實現將區域內割草並自動返回充電樁的功能。
以上圖片來源於網絡,如有侵權請聯繫刪除。
評論