

背景介紹
毫米波雷達大規模用於汽車輔助駕駛的傳感器,由於受氣象變化、可見光強弱影響較小,測距較精準,可以和攝像頭取長補短,共同實現可靠的AEB功能。2018年版C-NCAP加入了主動安全配置(AEB)性能測試要求,而2021年版C-NCAP調高了主動安全部分權重【1】。交通運輸部發布了《營運車輛自動緊急制動系統性能要求和測試規程》(JT/T1242-2019)於2019年4月1日起正式實施。該標準規定了營運車輛自動緊急制動(AEB)系統的一般要求、功能要求、環境適應性要求和測試規程。
本文簡要介紹了毫米波雷達信號處理流程,及其方案實現中所用的主要晶片,希望能使大家初步了解毫米波雷達的信號處理原理及其硬體實現。 英飛凌技術專家 ——— 錢偉喆
信號處理流程
典型的毫米波雷達信號處理流程如下面圖1所示。從雷達射頻前端採集到的模擬信號,通過高速ADC轉換成數字信號,送入單片機內的信號處理單元。處理單元首先對該時域信號進行干擾抑制,之後分別在距離和都卜勒維度進行FFT運算,得到多個天線的二維距離-都卜勒頻域結果。在此基礎上進一步處理,比如數字波束成形,通過恆虛警率(CFAR)過濾,篩選出點目標等等。之後對已經過濾出的點目標進行角度計算,接著基於提取出的點目標距離、速度和角度信息,將它們聚類,因為實際上來自同一個較大反射面積的目標(比如商用車)可能會有多個反射點,聚類算法就是找出可能來自同一個目標的點集。上述一系列步驟完成了目標檢測,之後就是目標跟蹤,由於實際物體目標的距離、速度和角度不可能在較短時間內(雷達信號處理周期一般是50ms-70ms)變化較大,利用這個性質對目標的運動軌跡進行跟蹤預測,結合本車的運動信息,來判斷目標是否有可能出現在本車的運行軌跡上。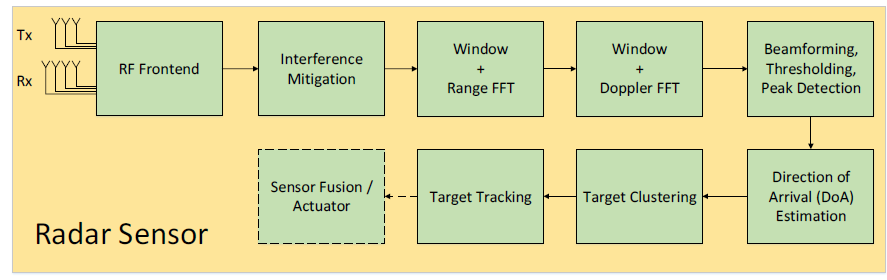
圖1.毫米波雷達典型信號處理流程
圖1中最後一個功能模塊用虛線標註,這是由於各家主機廠的傳感器融合構架不同,最後一步的傳感器融合/執行可以放在雷達傳感器內,也可以放在攝像頭模塊內實現,甚至當傳感器數量較多時,有獨立的融合模塊。它的主要功能是結合不同傳感器的目標檢測結果,做出最終判斷。多個傳感器檢測融合的優點,一是取長補短,擴大檢測範圍及使用場景;二是增加系統冗餘,提高系統功能安全級別,降低虛報或誤報率。融合後的最終決策信息給到車輛執行機構,可以實施告警、或者剎車、加減速、轉向等等車輛控制。
硬體實現
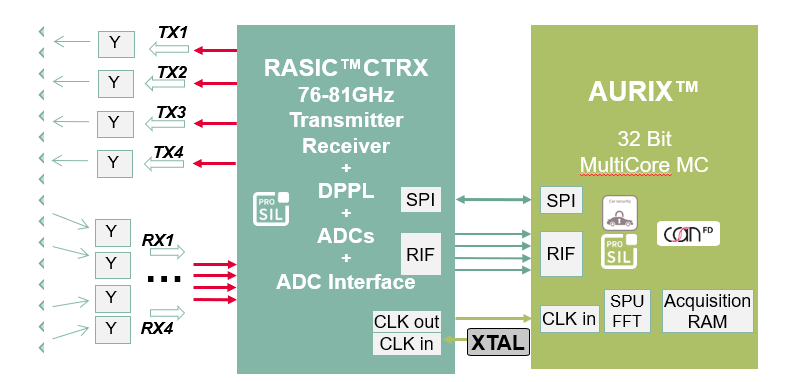
圖2. 英飛凌76-81GHz汽車毫米波雷達方案
圖2中另一個重要晶片是實現雷達信號處理的AURIXTM 2G單片機。AURIXTM 2G是英飛凌32位車規級單片機,片內資源豐富,適合多種汽車應用。從雷達射頻晶片CTRX輸出的數字信號,通過LVDS(low-voltage differential signal)高速同步串行口,進入單片機內的RIF(Radar interface)單元進行數據校驗及整形,發送給下一級單元SPU(signal process unit),進行雷達信號處理,輸出的中間及最終結果可存儲於片內RAM。如果是中間結果,比如第一維距離FFT的結果,先存儲在RAM,之後被SPU讀取,經過再次運算得到第二維都卜勒FFT結果。通常SPU用於實現雷達信號預處理,如圖1所示,SPU可以完成數字波束成形,CFAR濾波及點目標檢測,之後的到達角計算,也可以用SPU進行FFT運算獲取。如果使用超解析度算法,則需要CPU實現。AURIXTM 2G片內有多個CPU支持浮點運算,配合DSP函數庫,便於實現更靈活更複雜的算法。檢測出的目標或濾波後的點雲數據可以通過豐富的通訊接口傳給融合單元,AURIXTM 2G提供多路CAN-FD,和千兆以太網接口,方便配合實現不同的融合架構。AURIXTM 2G實現了ASIL-D功能安全等級,片內集成了大量硬體安全機制,從而節省了要用軟體彌補硬體不足的資源開銷。從射頻晶片發出的信號,途徑LVDS,RIF,SPU,RAM,CPU,內部總線等,整個數據處理路徑使用的硬體部件,都有相應的安全機制保證數據的完整性,可靠性。
總結
本文簡要介紹了毫米波雷達信號處理流程,以及英飛凌提供的硬體實現方案。前端射頻晶片的高性能,保證了更好的雷達檢測指標的可實現性,比如更精準更遠的測距,更寬範圍的測速,更精準的測角,更少的干擾等等。而後端單片機的豐富硬體資源,能快速精準地將大量原始數據及時處理完成。千兆以太網接口能將原始數據、或距離FFT結果傳送給上層ECU,方便系統實現不同的融合架構。豐富的功能安全硬體機制保證了數據的完整性、可靠性。
參考文獻
【1】“C-NCAP 管理規則(2021 年版修訂版),附錄C主動安全ADAS 系統試驗方法”,中國汽車技術研究中心有限公司。
原文鏈接:https://mp.weixin.qq.com/s/2JA_bTj9-C4bL3lubhwU7w
請掃描二維碼關注英飛凌微信
評論