简
Loading..
精彩回放
边缘智控,微显大智:恩智浦MCX N系列在AI应用中的创新
12 天前
直播日程
更多直播日程>>
直播日程
精彩回放
14
星期二
一月
以 AI 结合 RPA 系统 - 突破制造业四大成长困境
10:00
立即报名
25
星期二
二月
链接未来:NFC技术驱动智能生活与车规创新
10:00
立即报名
更多直播日程>>
技术博主
AI
63位追随者
ATU 伊布小编 (一部)
关注我
最新文章:
【ATU Book-i.MX 系列 - ML】手把手教你玩 AI - NXP i.MX 8M Plus 结合 Hail-8 AI 芯片带领你快速实现 AI 应用
文章篇数:
73
ISP/CIS
36位追随者
影像新视力
关注我
最新文章:
从这几款全局快门图像传感器,了解图像传感器的选型要点
文章篇数:
48
汽车
147位追随者
汽车大牛
关注我
最新文章:
FreeMaster 入门
文章篇数:
229
第三代半导体
111位追随者
STM32
关注我
最新文章:
ST 意法半导体推出采用强化版STripFET F8技术的标准阈压40V MOSFET
文章篇数:
169
工业控制
48位追随者
工业大牛
关注我
最新文章:
基于 BPS LKS32MC45X 的呼吸灯控制
文章篇数:
24
Wireless & Audio
45位追随者
声波电波就看今朝
关注我
最新文章:
蓝牙|软件 Qualcomm S7 Sound Platform开发系列之初级入门指南
文章篇数:
45
电源
20位追随者
英飞凌电源协作家
关注我
最新文章:
新品 | 3300W无桥图腾柱PFC参考设计
文章篇数:
42
查看更多技术专家>>
最新文章
热门文章
方案
STEVAL-TTM001V1 - SR5E1电机控制硬件套件,适用于汽车电机控制应用
方案
基于ST的VIPERGAN65和SRK1004的65W QR USB PD适配器参考设计
方案
基于Synaptics SL1680之AI疲劳驾驶检测方案
博文
高输出电流 3A LDO 提供低噪声和高 PSRR 电源,适用于噪声敏感型产品应用
博文
易冲CPS8826通过USB PD 3.2认证
博文
蓝牙|软件 Qualcomm S7 Sound Platform开发系列之初级入门指南
博文
艾为电子推出全新一代车规级1x10W、1x22W模拟音频功放
视频中心
+
更多内容
推荐
2023年12月18日
Matter协议STM32技术解决方案
推荐
9 个月前
英飞凌主驱逆变器助力电动汽车跑得快跑得远
最新
1 天前
智慧监控革新:Hailo AI 技术驱动新局面_簡英
方案知识库
+
更多内容
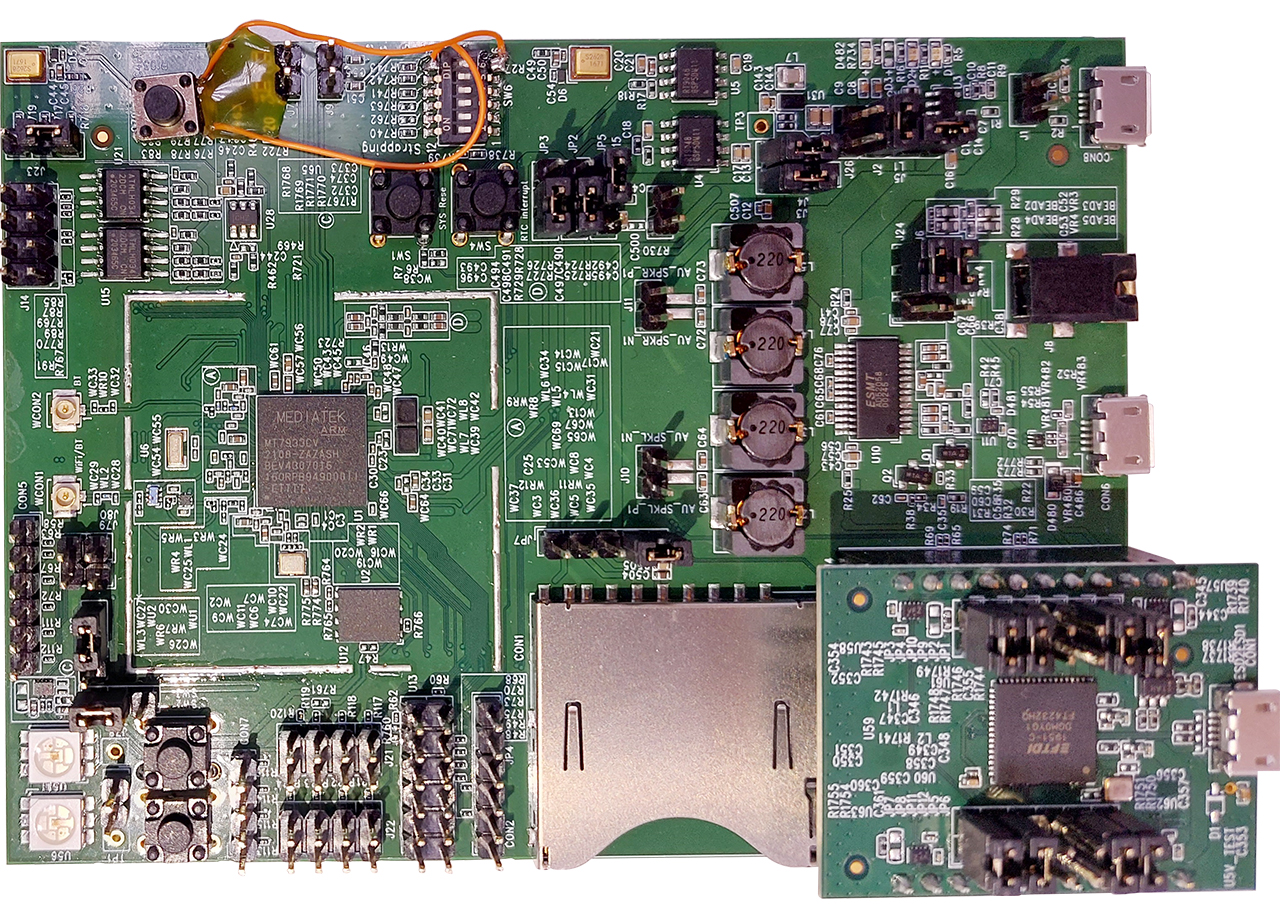
物联网
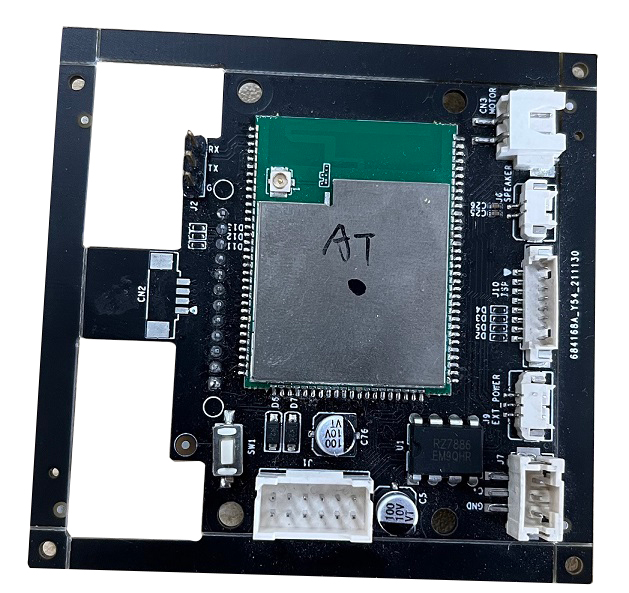
2022年5月6日
MediaTek Genio 130A(MT7933) Wi-Fi6 AI 智能门锁方案
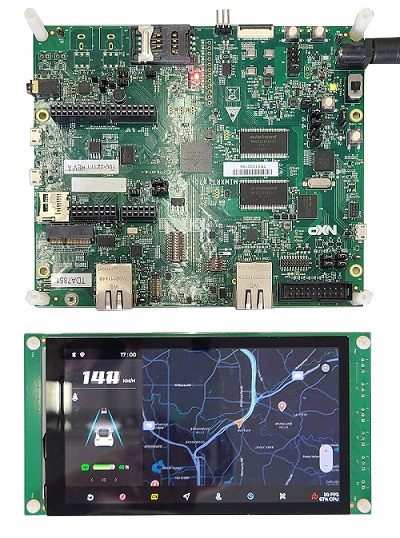
汽车
2022年5月12日
基于 NXP i.MXRT1170 汽车仪表盘方案
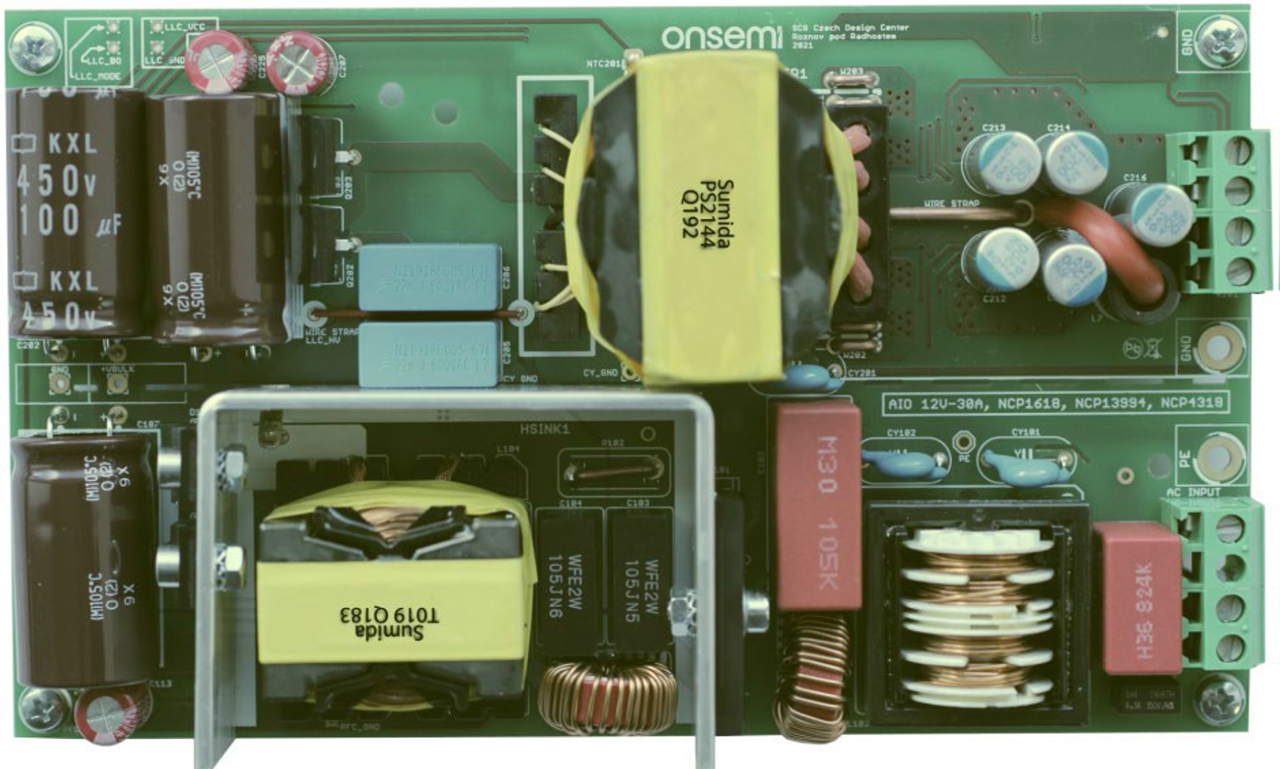
电源
2022年5月16日
onsemi 新一代 NCP1618+NCP13994+NCP4318: All-in-one 360W高效电源设计方案
更多
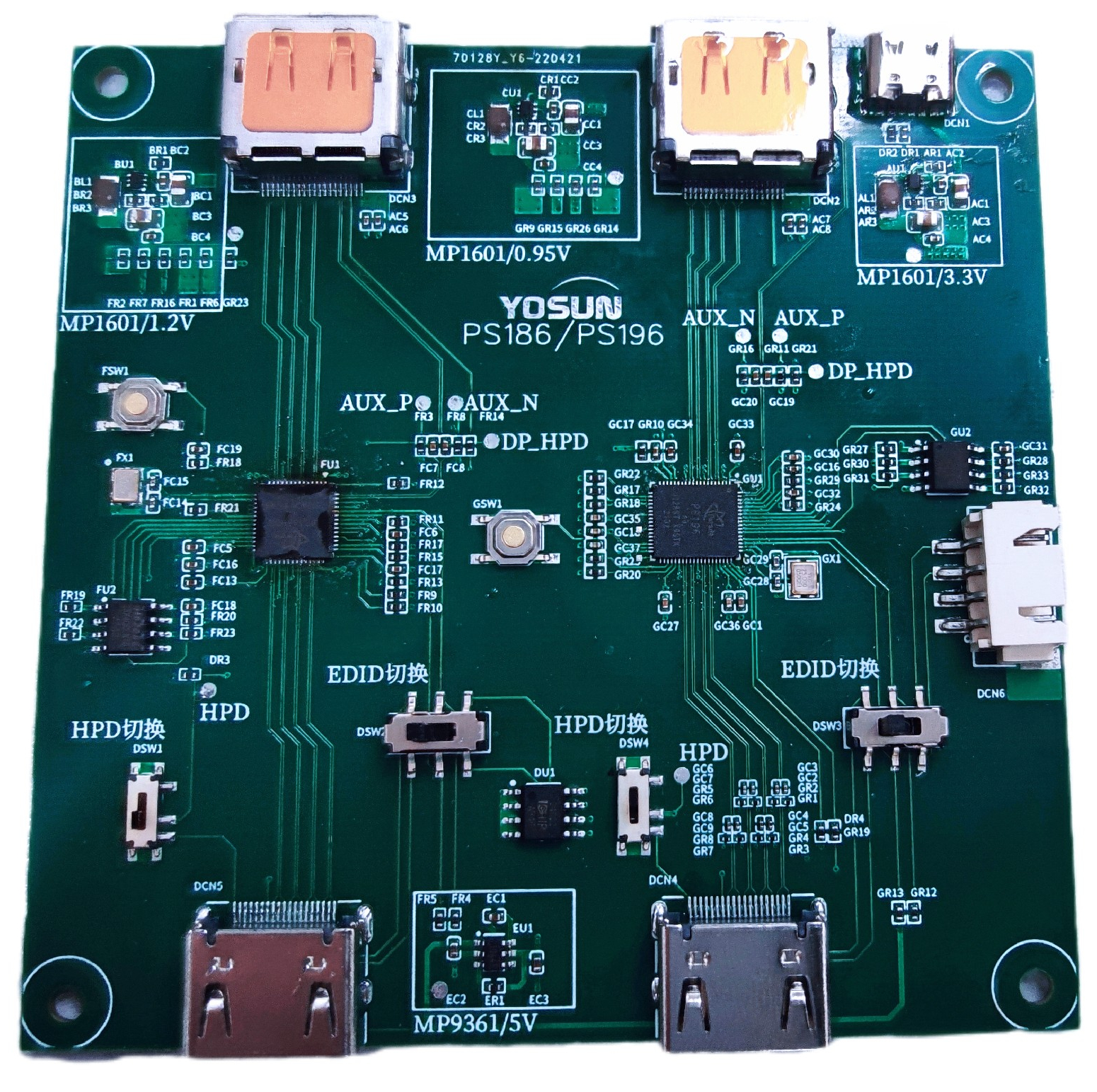
2022年5月18日
基于谱瑞PS196的DP2.0转HDMI2.1之扩展坞方案
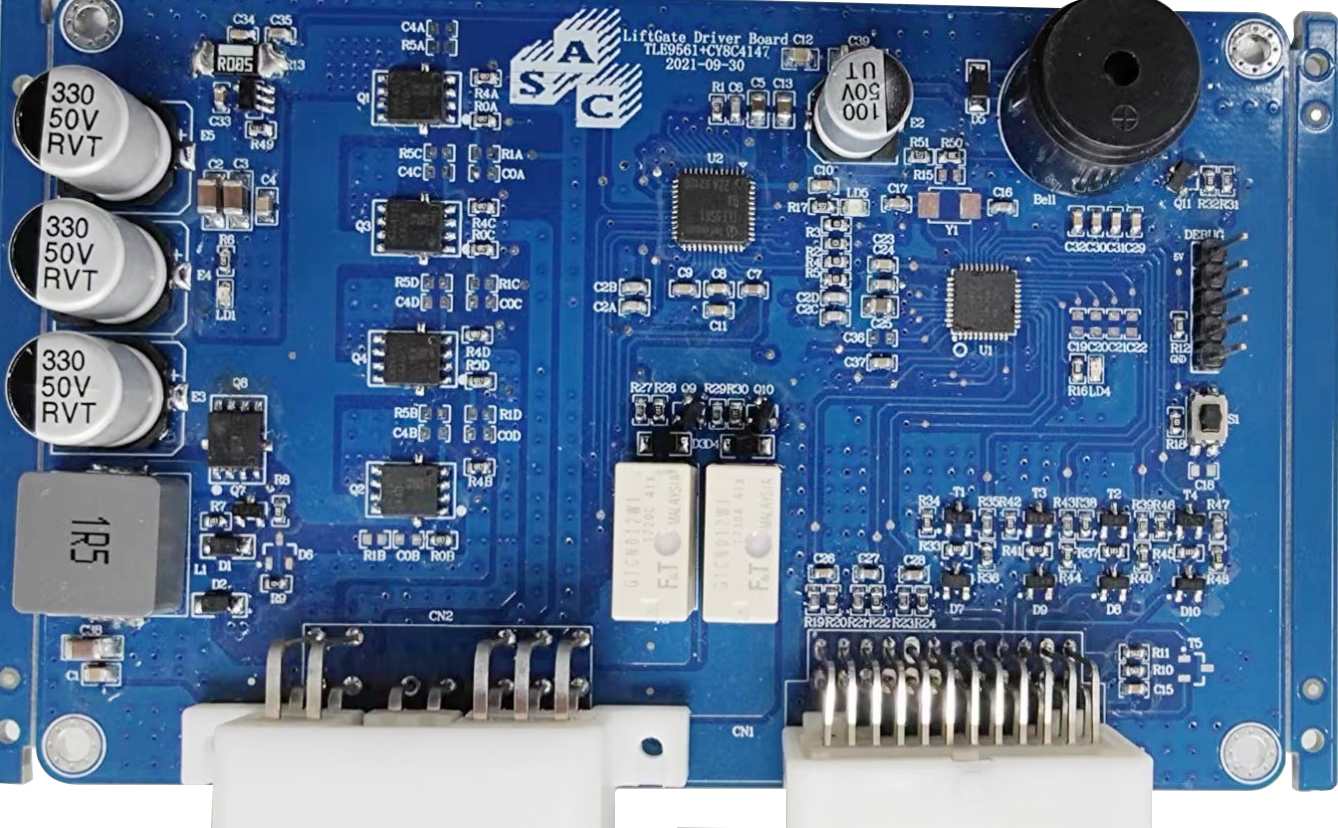
汽车
2022年5月11日
基于英飞凌TLE9561的汽车电动尾门方案
更多
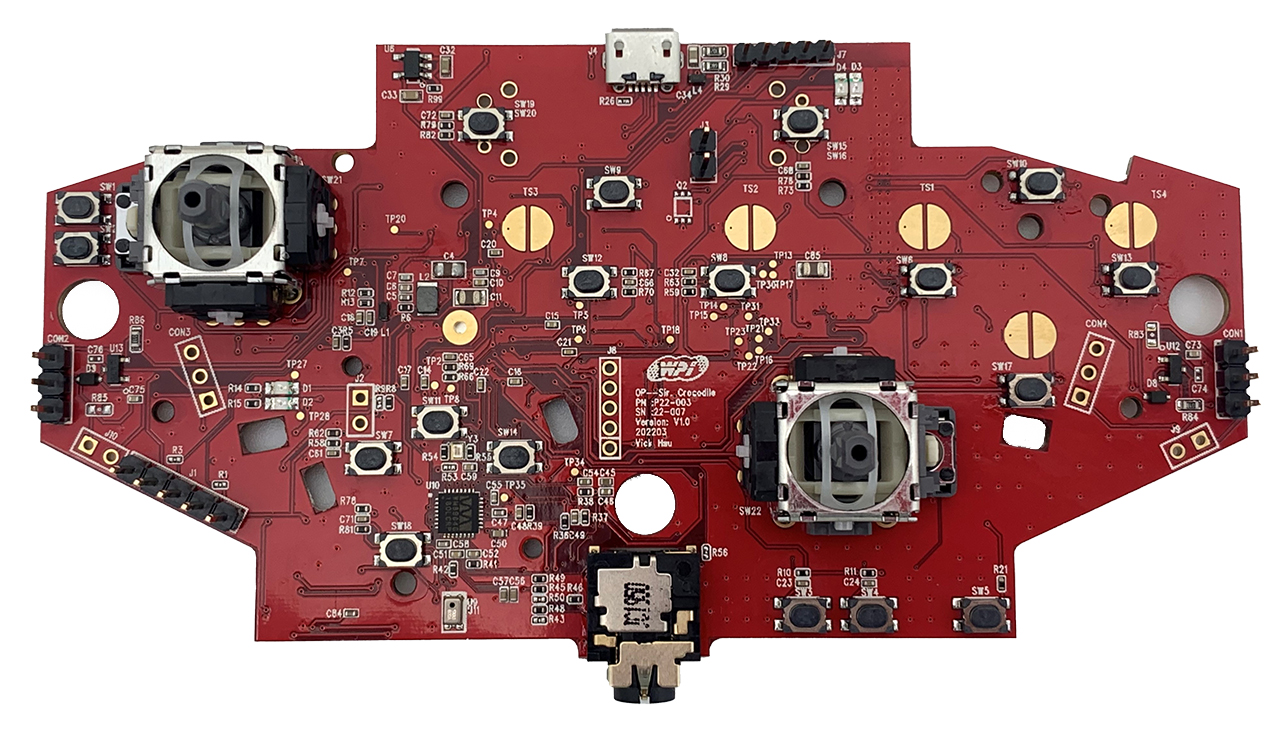
2022年5月7日
走入虚拟世界,电竞游戏杆带你成为游戏主宰
物联网
2022年5月24日
基于STM32MP157AAC的OpenHarmony折叠开发板--BearPi-HM Micro
物联网
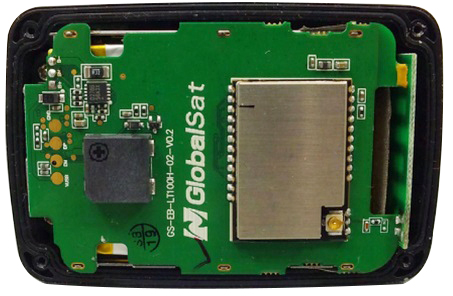
2022年5月26日
基于使用 Semtech SX1276 之环天 LT100 与Helium系统所架构之GPS追踪器
电源
2022年5月10日
基于立錡 Richtek RT7757+RT7220D+RT7202KLA的Type-C 65W PD快充方案
物联网
2022年5月20日
MediaTek Genio 130A Wi-Fi 6 亚马逊智慧物联网语音辨识方案
博文专区
+
更多内容
MediaTek Genio 130A WiFi 6 + BT 5.2 BT Test Tool - Boots 介绍
中科蓝讯 Bluetrum 智能穿戴蓝牙 Soc BT8918 介绍
高通QCC5171麦克风与Line in电路连接方式
【Semidrive】PTG3.8 / X9H 如何客制化开机动画
I2C协议简介
方案问答
+
更多内容
你好博主,关注您了可否分享下rg-password工具
完整的设计方案
资料share
方案价格相关
想要采购相关的方案

 63位追随者
63位追随者 36位追随者影像新视力
36位追随者影像新视力 147位追随者汽车大牛
147位追随者汽车大牛 111位追随者
111位追随者 48位追随者工业大牛
48位追随者工业大牛 45位追随者
45位追随者